



CoMManDIA
Manipulação robótica móvel colaborativa de objetos deformáveis em aplicações industriais

Eixo 1 Investigação e inovação
Objetivo 1b2 Desenvolver a divulgação da investigação aplicada relacionada com as tecnologias facilitadoras essenciais
Custo total eligível (€)
1.257.109,73 €
Ajuda FEDER (€)
942.832,31 €
Galeria





Setores
- Indústrial têxtil, do vestuário e do calçado
- Agroindústria e indústria madeireira
- Tecnologias industriais (processos, equipamentos, maquinaria e componentes)
2. Universidad de Zaragoza (ES)
3. ASOCIACIÓN DE INVESTIGACIÓN PARA LA INDUSTRIA DEL CALZADO Y CONEXAS (ES)
4. UNIVERSIDAD DE ALICANTE (ES)
5. Universidade de Coimbra (PT)
Resumo do projeto
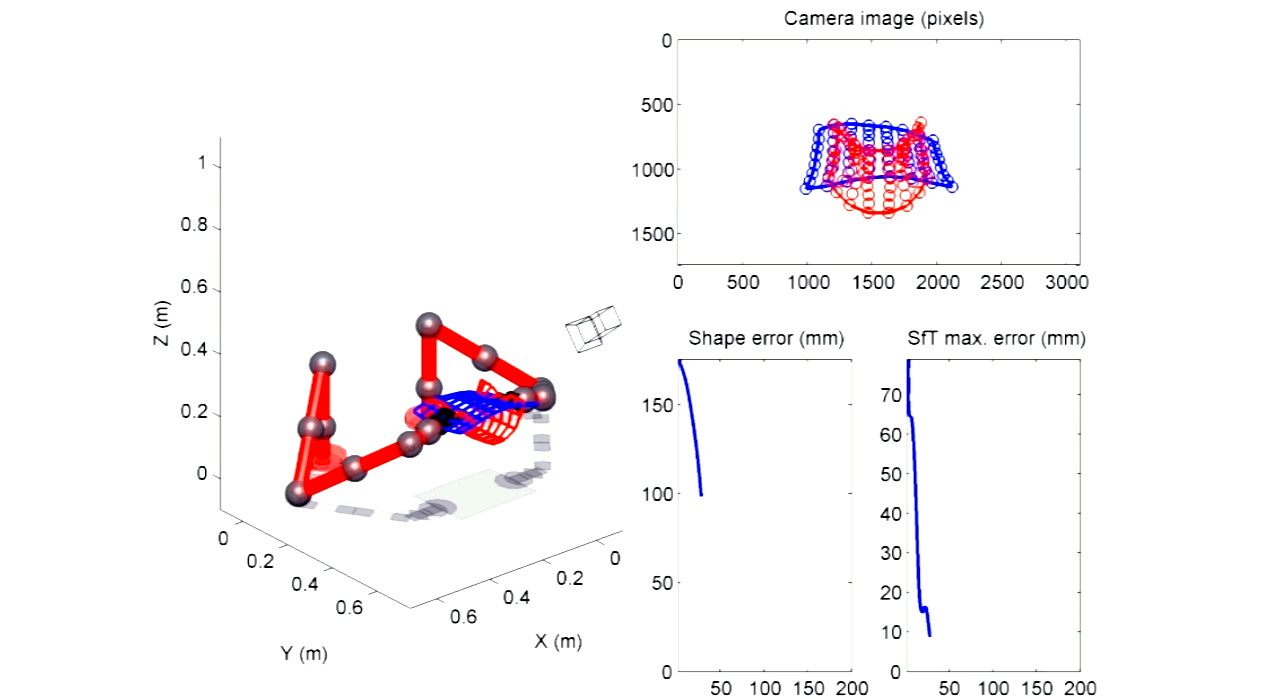
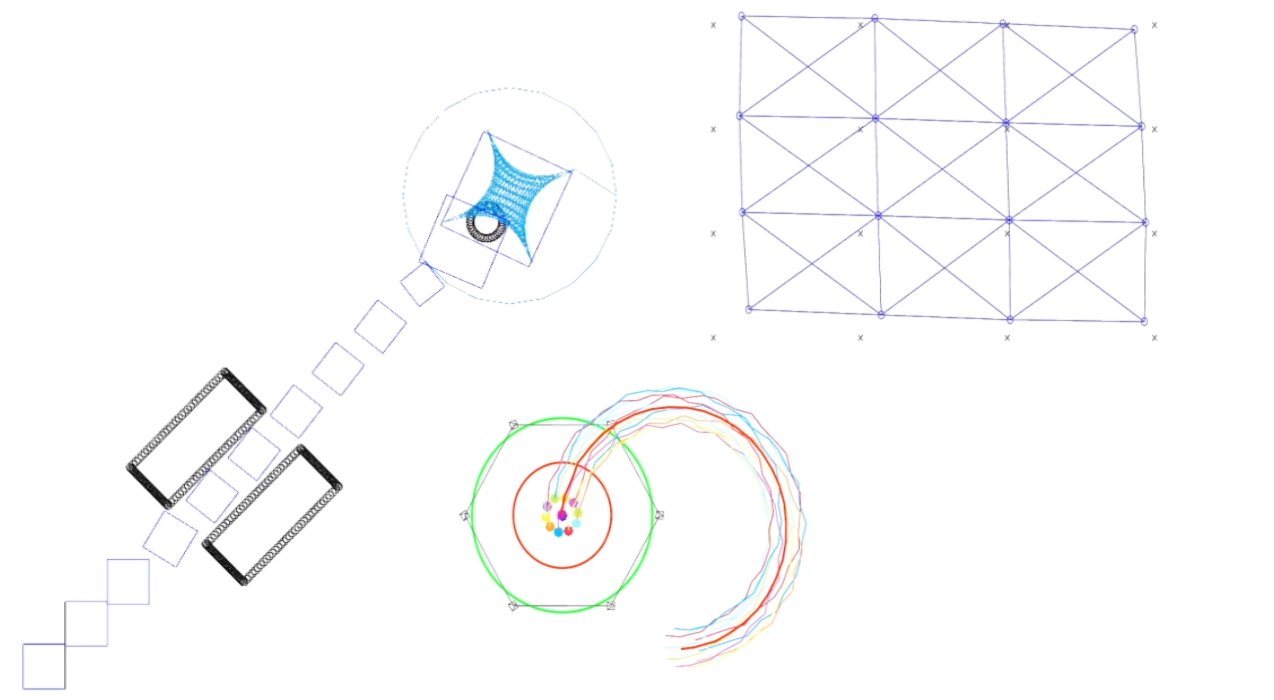
COMMANDIA propõe técnicas de controlo para manipuladores móveis (robôs com braços robóticos industriais) para realizar tarefas industriais nas quais se manipulam produtos macios com destreza. Assim, os operadores humanos não têm que realizar manipulações repetitivas e exaustivas, podendo concentrar-se noutras tarefas. O projeto baseia-se em três elementos:
- A contextualização: o robô faz o seguimento da deformação do produto para poder realiza-la em tempo real de forma precisa;
- A multi-modalidade: o projeto combina vários sensores para assegurar uma maior reatividade e adaptabilidade do robô e;
- A colaboração: o robô trabalhará com outros robôs para poder manipular objetos maiores, realizar tarefas mais complexas e interatuar com operadores humanos.
COMMANDIA permite ampliar o uso de robôs colaborativos em industrias estratégias evitando que as tarefas se realizem de forma manual em países com mão de obra barata.
Regiões participantes
- Aragón
- Auvergne
- Centro
- Comunidad Valenciana
Destinatários
- Centros e parques tecnológicos / científicos
- Outros
- Pequena e média empresa