



CoMManDIA
Manipulation robotique mobile collaborative d'objets déformables dans des applications industrielles

Axe 1 Recherche et innovation
Objectif 1b2 Développer la diffusion de la recherche appliquée en relation avec les technologies clés génériquesGalerie d'images





- Industrie textile, vestimentaire et de la chaussure
- Agro-industrie et industrie du bois
- Technologies industrielles (processus, équipement, machinerie et composants)
2. Universidad de Zaragoza (ES)
3. ASOCIACIÓN DE INVESTIGACIÓN PARA LA INDUSTRIA DEL CALZADO Y CONEXAS (ES)
4. UNIVERSIDAD DE ALICANTE (ES)
5. Universidade de Coimbra (PT)
Résumé du projet
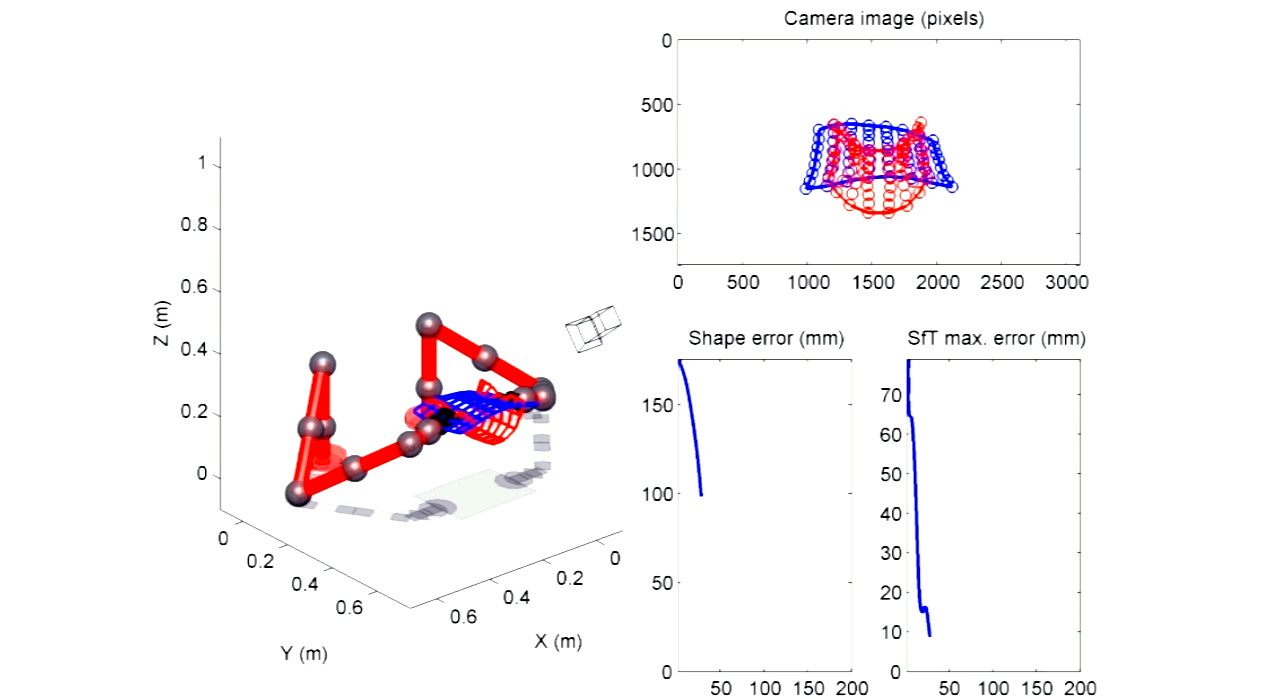
COMMANDIA offre des techniques de contrôle pour les manipulateurs mobiles (robots avec des bras robotiques industriels) afin de mener des tâches industrielles qui requièrent la manipulation de produits deformables avec dextérité. Ainsi, les opérateurs humains n’ont pas à réaliser des tâches répétitives et épuisantes, pouvant se concentrer sur des tâches plus intellectuelles. Le projet est axé sur trois éléments:
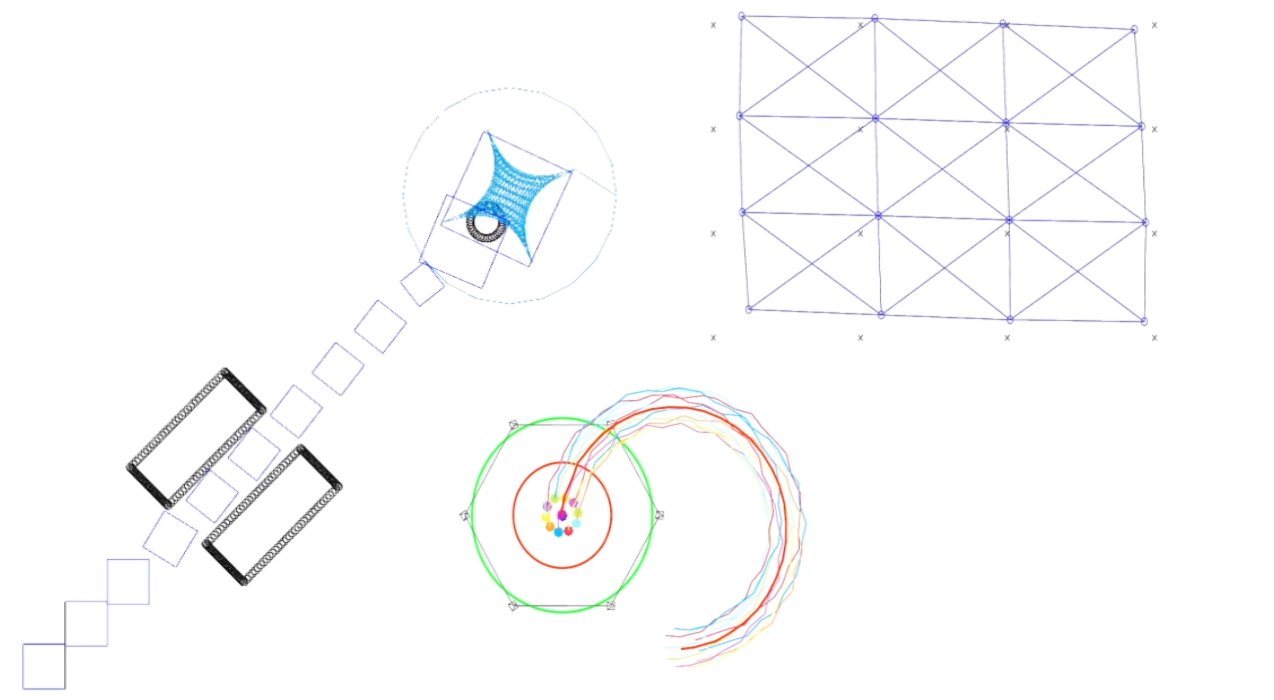
- La contextualisation: le robot suit la déformation du produit afin de pouvoir la répliquer en temps réel, précisement;
- La multi-modalité: le projet combine plusieurs capteurs pour garantir une réactivité et adaptation robotique majeures et;
- La collaboration: le robot sera utilisé avec d’autres robots pour pouvoir manipuler des objets plus grands, réaliser des tâches plus complexes et interagir avec d’autres opérateurs humains.
COMMANDIA permet d’élargir l’utilisation de robots collaboratifs dans les industries stratégiques afin d’éviter que les tâches soient réalisées de forme manuel dans les pays où la main d’oeuvre est bon marché.
Régions participantes
- Aragón
- Auvergne
- Centro
- Comunidad Valenciana
- Grande entreprise
- Parc naturel regional
- Trés petite entreprise (TPE)