



CoMManDIA
Robótica móvil colaborativa de objetos deformables en aplicaciones industriales

Eje 1 Investigación e innovación
Objetivo 1b2 Desarrollar la difusión de la investigación aplicada relacionada con las tecnologías facilitadoras esenciales
Coste total subvencionable (€)
1.257.109,73 €
Ayuda FEDER (€)
942.832,31 €
Galería de imágenes





Sectores
- Industria textil, vestuario y calzado
- Agroindustria e industria maderera
- Tecnologías industriales (procesos, equipos, maquinaria y componentes)
2. Universidad de Zaragoza (ES)
3. ASOCIACIÓN DE INVESTIGACIÓN PARA LA INDUSTRIA DEL CALZADO Y CONEXAS (ES)
4. UNIVERSIDAD DE ALICANTE (ES)
5. Universidade de Coimbra (PT)
Resumen del proyecto
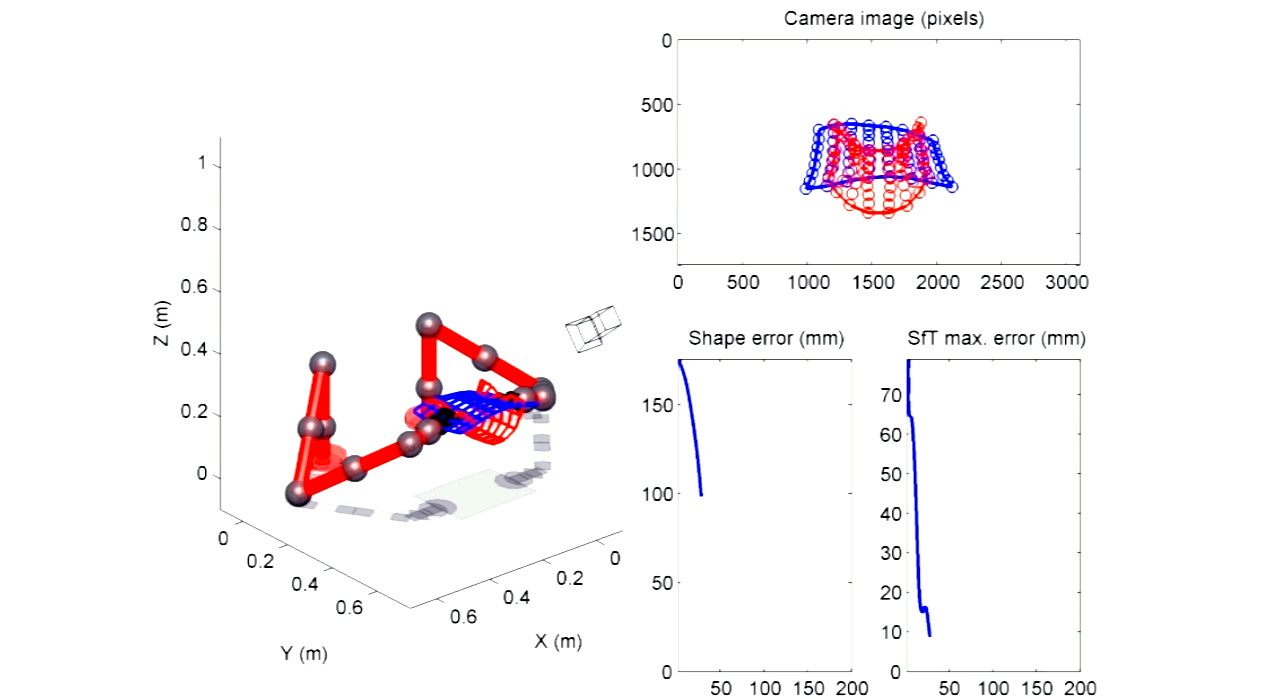
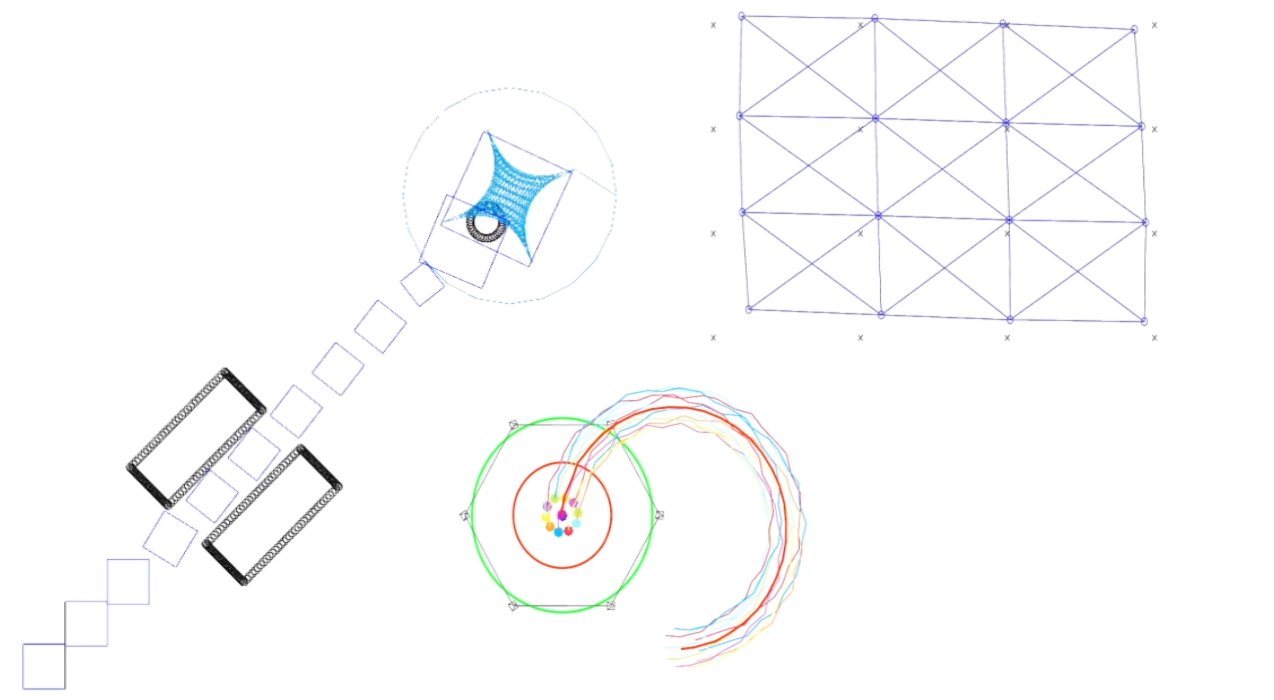
COMMANDIA propone técnicas de control para manipuladores móviles (robots con brazos robóticos industriales) para llevar a cabo tareas industriales en las cuales han de manipularse productos blandos con destreza. Así, los operadores humanos no han de realizar manipulaciones repetitivas y agotadoras, pudiendo concentrarse en tareas más cerebrales. El proyecto se basa en tres elementos:
- La contextualización: el robot rastrea la deformación del producto para poder realizarla en tiempo real de forma precisa;
- La multimodalidad: el proyecto combina varios sensores para garantizar una mayor reactividad y adaptabilidad del robot y;
- La colaboración: el robot trabajará con otros robots para poder manipular objetos más grandes, realizar tareas más complejas e interactuar con operadores humanos.
COMMANDIA permite extender el uso de robots colaborativos en industrias estrategias evitando que las tareas se realicen de forma manual en países con mano de obra barata.
Regiones participantes
- Aragón
- Auvergne
- Centro
- Comunidad Valenciana
Destinatarios
- Gran empresa
- Otros
- Pequeña y mediana empresa (PYME)